Xin Li's Homepage
Profile
|
Xin Li (李鑫)
I currently work as a Research Assistant at Nanyang Technological University (NTU), Singapore, under the supervision of Prof. Chau Yuen. I obtained my Master's degree from Peking University and Bachelor's degree from Northeastern University (CN). I am passionate about developing algorithms that enable robots to understand the world around them. I am now focusing on the research of learning-based perception. Email GitHub Google Scholar LinkedIn
|
|
News
- 2024.04: Start my new journey in NTU as a Research Assistant.
Publications
This is a list of my publications. You can also find them on Google Scholar.
(* equal contribution)
Filter by Tag:
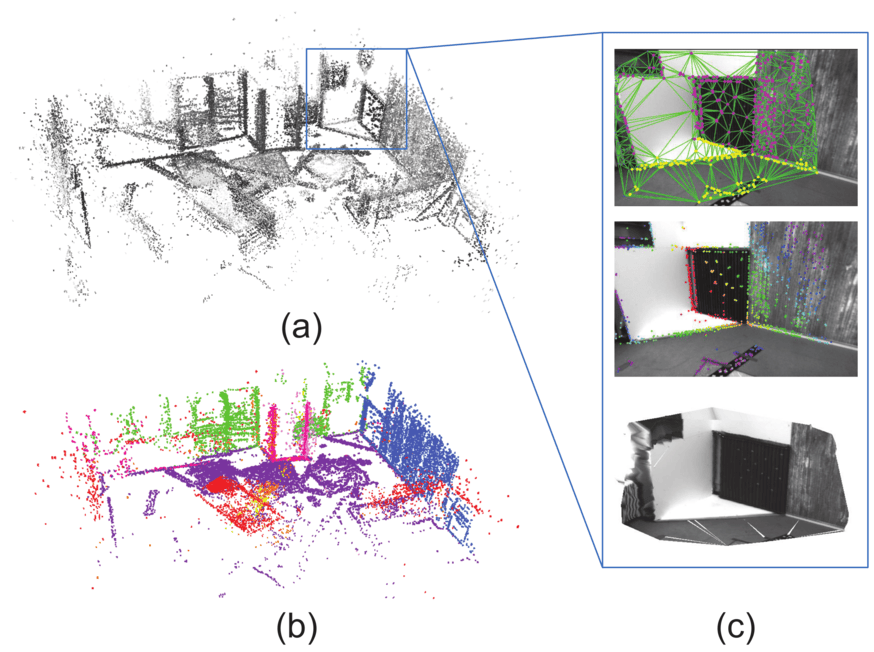
PVI-DSO: Leveraging Planar Regularities for Direct Sparse Visual-Inertial Odometry
Published in: IEEE Sensors Journal, 2023
PDF /
arXiv /
Code /


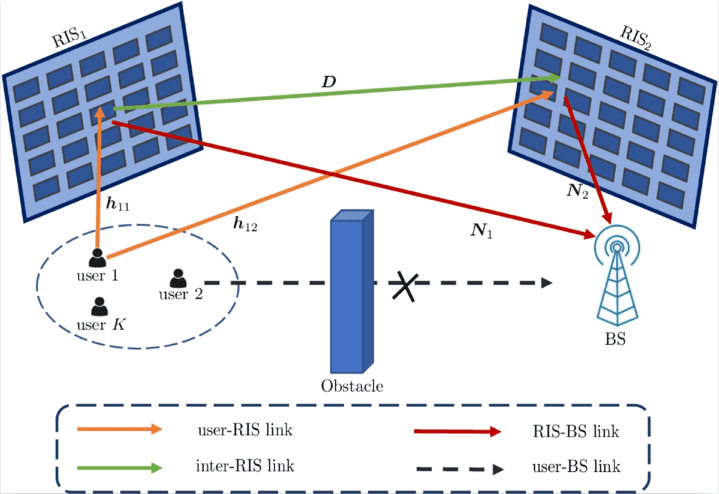
Deep Learning-Based Channel Estimation for Double-RIS Aided Massive MIMO System
Published in: IEEE Wireless Communications Letters (WCL), 2022

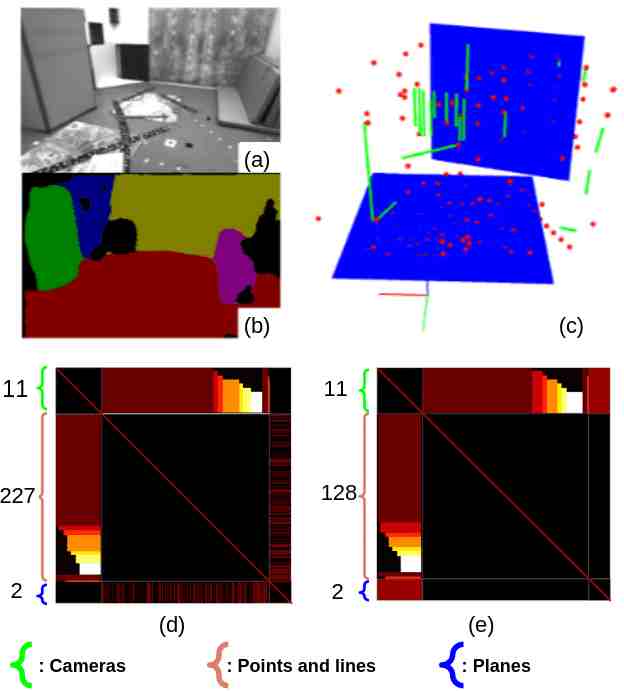
Co-Planar Parametrization for Stereo-SLAM and VIO
Published in: IEEE Robotics and Automation Letters (RA-L), 2020


Leveraging Planar Regularities for Point Line Visual-Inertial Odometry
Published in: IEEE/RSJ international conference on intelligent robots and systems (IROS), 2020
PDF /
arXiv /
Video /
Code /
/


Experience
This is a list of my experience. You can also find them on LinkedIn.
Research Assistant
2024.04 - Present in Nanyang Technological University
(NTU), Singapore
2021.07 - 2022.03 in Singapore University of Technology
and Design (SUTD)
Supervisor: Prof. Chau Yuen
SLAM Algorithm Engineer - Gaussian Robotics,
Singapore
2022.03 - 2024.03
Leader: Dr. Yingcai Bi
(毕英才) and Dr. Xuesong
Shi (史雪松)
Research Intern
2020.09 - 2021.04 in Microsoft Research
Asia (MSRA), Beijing, China. Supervised by Dr.
Yang Liu (刘洋) and Dr. Yizhong Zhang (张译中)
2019.09 - 2020.03 in Megvii (a.k.a Face++), Beijing,
China. Supervised by Dr.
Yijia He
(贺一家)
Education
This is a list of my education. You can also find them on LinkedIn.
Masters of Engineering (M.Eng.) - Peking University
2018.09 - 2021.07
Major: Electronics and Communication Engineering
Thesis: Multi-feature Simultaneous Localization and Mapping with
coplanar constraints
Supervisor: Prof.
Jinlong Lin (林金龙)
Bachelor of Engineering (B.E.) - Northeastern University
(CN)
2014.09 - 2018.07
Major: Measurement and Control Technology and Instruments